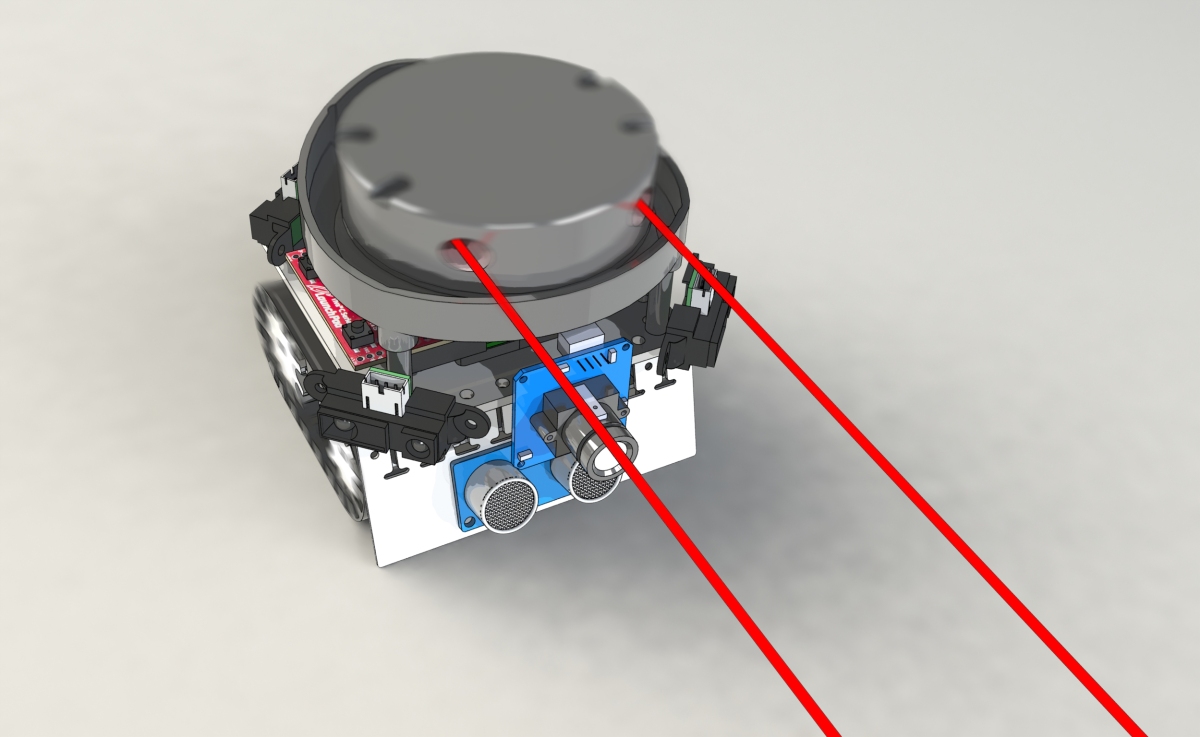
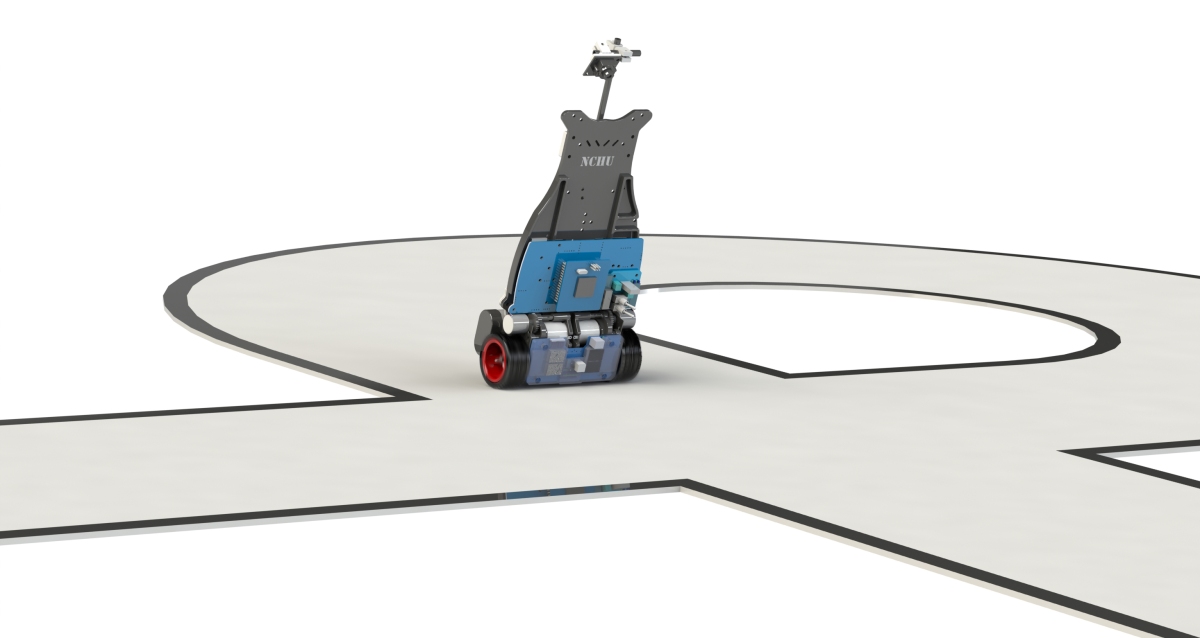
I’ve been working on a robot to study the SLAM (Simultaneous Localization And Mapping) algorithm so I’ll post what’ve done so far in this article.This project pretty much involved all the stuff I know and all the knowledge I used in other projects.So for the time being I’ll just put the link of these previous projects for some of my thought and save some time.
Category: Robotics
A Review of Multisensor Data Fusion for ADAS
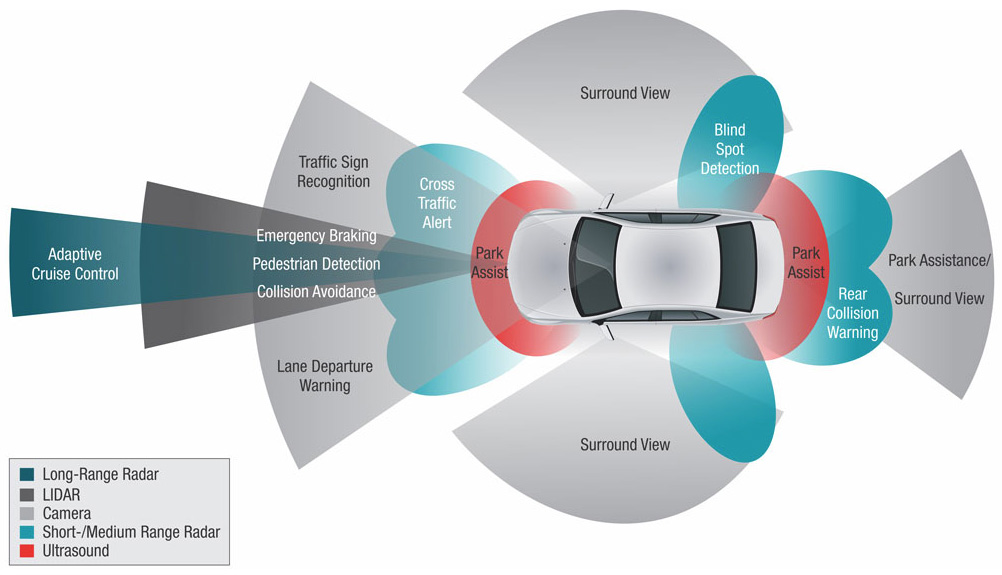
This is a review of Mahdi’s research of ‘Multisensor Data Fusion Strategies for Advanced Driver Assistance Systems’[1].This paper introduced the current(2009) research result of ADAS on vehicles.The authors then proposed a 4-layer model for multisensor fusion,at last,they proposed using fuzzy logic for multisensor fusion in Automatic Cruise Control(ACC).This is also one of my preliminary research on ADAS.Later on I’ll post the SLAM robot I built for simulating the self-driving vehicle control,as well as practicing the algorithms in Artificial Intelligent for Robotics course on Udacity.
Continue reading “A Review of Multisensor Data Fusion for ADAS”
Screw Driven Hexapod Robot Design
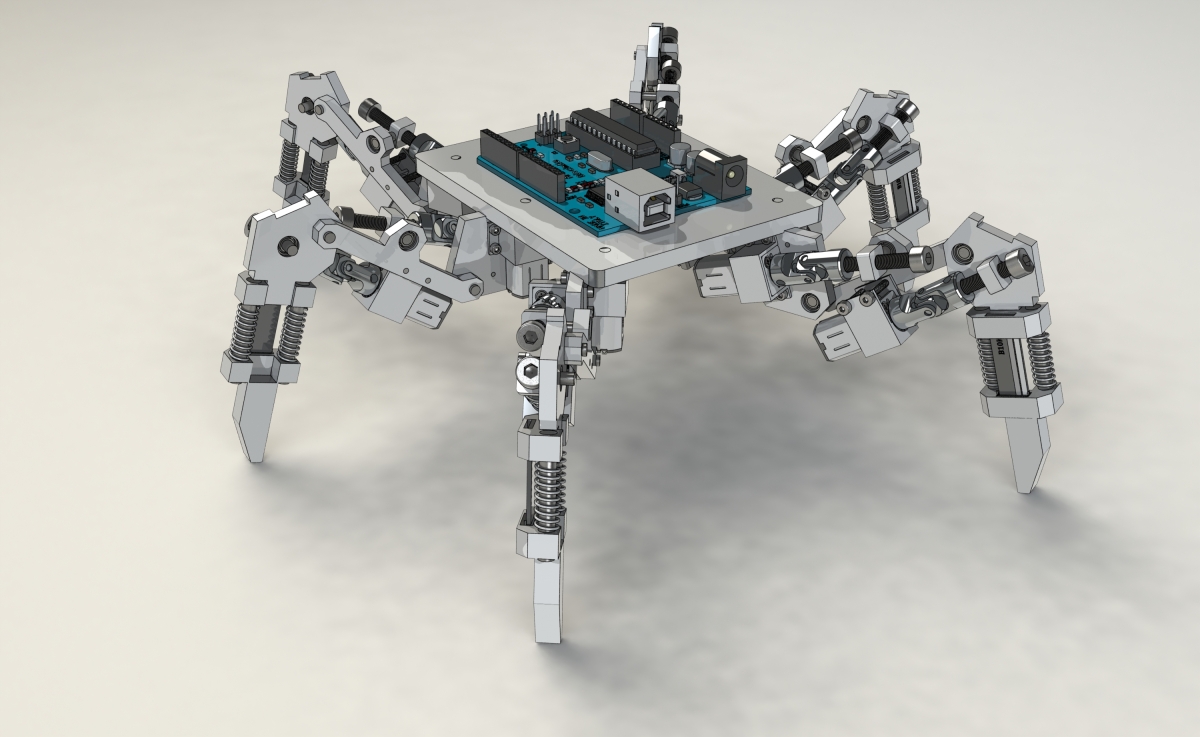
This is a robot I designed in summer holiday in 2012.This design is mainly a Solidworks modeling practice.I tried to use CAD software and simulation to verify my idea instead of trial and error with the gears,which was what I used to do.I did some analysis on the leg structure by hand at first,but it turned out to be very complicated.So later on I turned to use Solidworks to simulate the legs.The project was abandon later on because I had to put my effort in my CNC project,which lasted for more than two years.But I decided to post it out and maybe someone is interested in such a screw driven mechanism and my work could make some small contribution.
Simulation of Plot Clock for Optimization
This is a small program I wrote for simulating Plot Clock,which is a really hilarious small clock with two robotic scissor arm that keep plotting time on a panel.If you’ve never watched how it moved before,check this out.

Continue reading “Simulation of Plot Clock for Optimization”
Rotary Inverted Pendulum

This is a project I built with my teammates in an Electronics Design Contest in 2013.That contest was a electronics marathon as we were required to choose one of the given tasks and finished it in 4 days.No provided materials,no help from others so we had to built it from scratch.It’s definitely not perfect but we successfully finished all the requirement :) !
Building A Self Balancing Race Car
This post is to introduce the self-balancing smart car I built in 2013.My teammate and I spent several months to build a self-balancing car from a RC car chassis,and we also made most of the hardware modules and coded overnight just want to make it run faster and faster before the contest.Still remember the day when we competed with hundreds of teams from other universities :) Continue reading “Building A Self Balancing Race Car”
